MECHANISMS PROJECT
Fall 2014
Automated Rotary Shot Dispenser
Mechanical actuation via Geneva wheel and cam
ABOUT
A mechanical fluid dispenser that automatically fills up 6 shot glass in succession, with no electronics besides one DC motor.
This was created as a group project for ME130 (Design of Planar Machinery) at UC Berkeley. I aided in the mechanical design, machining, and final assembly. I was also responsible for creating and formatting final presentation and report.
IDEATION
After deciding to build some sort of fluid dispenser, various methods and form factors for the device were explored. The team wanted a design that focused solely on mechanical design and relied less on any sort of electromechanical actuation besides one motor. We also wanted to create a device that could fill up multiple containers, rather than just one.
One initial design had the fluid dispenser rotating, rather than the containers. However, this would mean that our mechanism would have to rotate a much larger mass (compared to moving just the containers), increasing the minimum required torque, thus resulting in increased complexity and cost.


Another design utilized a linear Geneva mechanism to move the containers. This mean the design would have to use a conveyor belt of sort, as the motion of the containers would be linear in one direction. But there was a functional concern of where the containers would go after being filled. Either the containers would be moved off the track (requiring a complex mechanism to avoid spillage) or increase the track so that they could remain on (increasing the cost/footprint of the device).
In the end, a rotary Geneva wheel was used to rotate containers into place, so that they can be filled. A Geneva wheel allows for a "pause," or dwell, so that the container is not moving while being filled. Also, it allows us to not depend on any sort of sensors or timers. And a rotary Geneva wheel requires a much smaller footprint compared to a linear one, as well as less material needed to make the mechanism.
Design
The next and arguably the most important feature was the fluid dispenser design. The device would ideally dispense the same amount of fluid into each container. We also wanted to minimize any excess spillage in between dispensing fluids from one container to the next. Because of this, we opted to not go with a singular valve design, as we were concerned about inconsistencies of fluid flow as the valve was closing/opening.
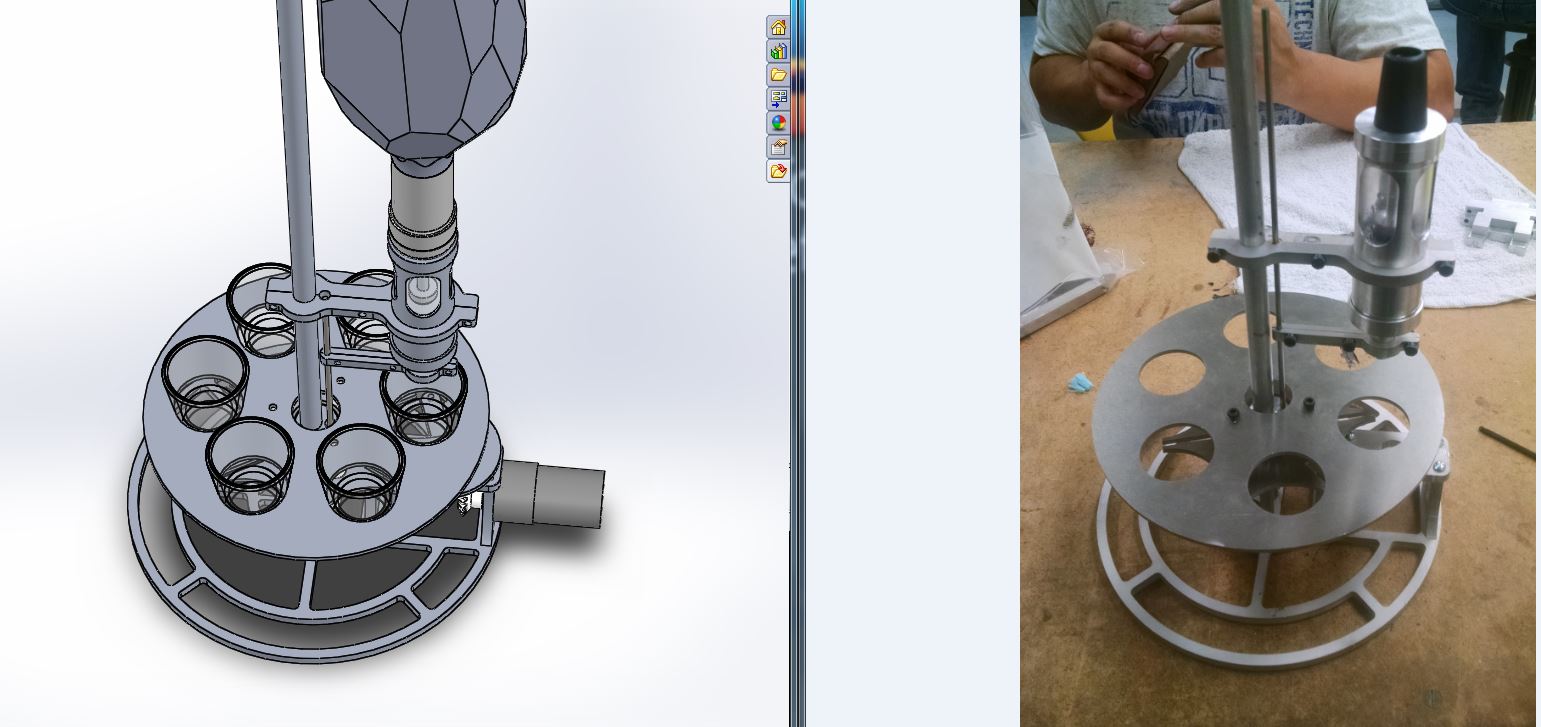
Inspired by an off-the-shelf component, we decided on using a reservoir that would act as an intermediary between the fluid and the container. The reservoir would be filled first. Then when the container was in place, the reservoir would be emptied into the container. This requires that no additional fluid is entering the reservoir while it is being emptied. To achieve this, our final design used two seals, one for the reservoir source and another for the reservoir exit.
To actuate the dispenser, we used a cam to actuate a pushrod that would be attached to the dispenser. This, with bevel gears, allowed us to use the same DC motor to power the Geneva wheel as well as the cam for actuation.


Manufacturing
All major components were custom machined, using a waterjet, mill, and lathe. The main structure was made out of 6061 aluminum for ease of machining, as well as cost. The pushrod used to actuate the dispenser was steel, to accommodate for bending stresses. Clear polycarbonate tubing was used for the reservoir, to allow a clear view of the fluid.